
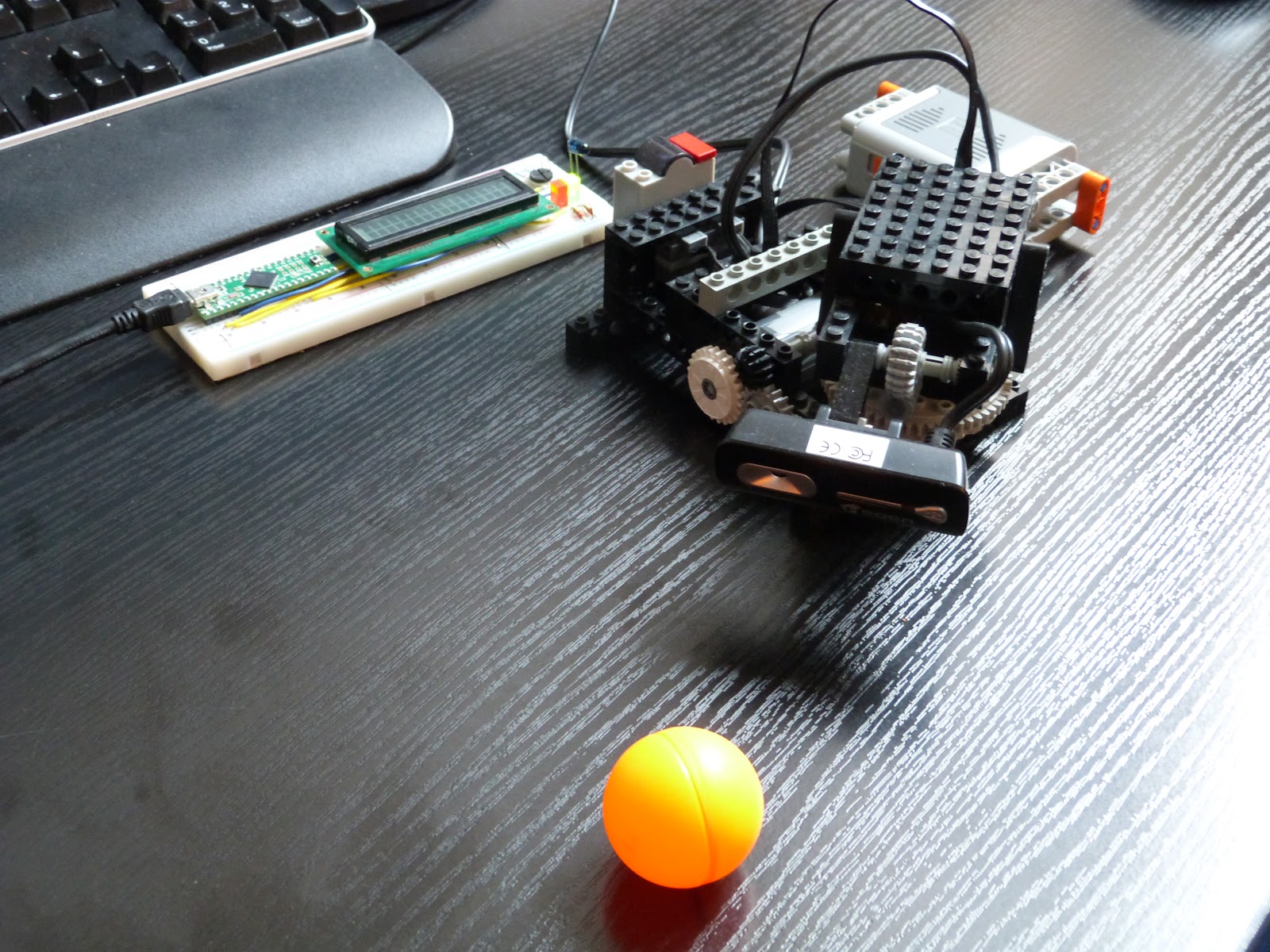
 Le projet robot tourelle suiveuse de balles, est sans doutes le premier d'une longue série de petits projets à venir. En effet les possibilités offertes par la librairie OpenCV sont impressionnantes et "simples" à mettre en place. L'idée de ce premier projet à base d'OpenCV est de réussir à déplacer une webcam montée sur un châssis rotatif afin que celle ci fixe une balle et la centre au milieu de l'image. Le châssis est entièrement réalisé en légos et la caméra est une petite webcam générique maintenue en place sur une pièce légo par des visses. La motorisation est un kit power functions contenant deux petits moteurs, le bloc batterie et le récepteur infrarouge légo. La webcam est branchée directement à un PC. La tourelle quand à elle est branchée aussi à l'USB grâce à une interface "maison" USB vers signaux infrarouges légo. Côté commande de la tourelle il suffit d'envoyer des chaines de caractères (correspondant à la rotation moteur voulue) dans le bon périphérique usb.
Le projet robot tourelle suiveuse de balles, est sans doutes le premier d'une longue série de petits projets à venir. En effet les possibilités offertes par la librairie OpenCV sont impressionnantes et "simples" à mettre en place. L'idée de ce premier projet à base d'OpenCV est de réussir à déplacer une webcam montée sur un châssis rotatif afin que celle ci fixe une balle et la centre au milieu de l'image. Le châssis est entièrement réalisé en légos et la caméra est une petite webcam générique maintenue en place sur une pièce légo par des visses. La motorisation est un kit power functions contenant deux petits moteurs, le bloc batterie et le récepteur infrarouge légo. La webcam est branchée directement à un PC. La tourelle quand à elle est branchée aussi à l'USB grâce à une interface "maison" USB vers signaux infrarouges légo. Côté commande de la tourelle il suffit d'envoyer des chaines de caractères (correspondant à la rotation moteur voulue) dans le bon périphérique usb.








